Key Dates
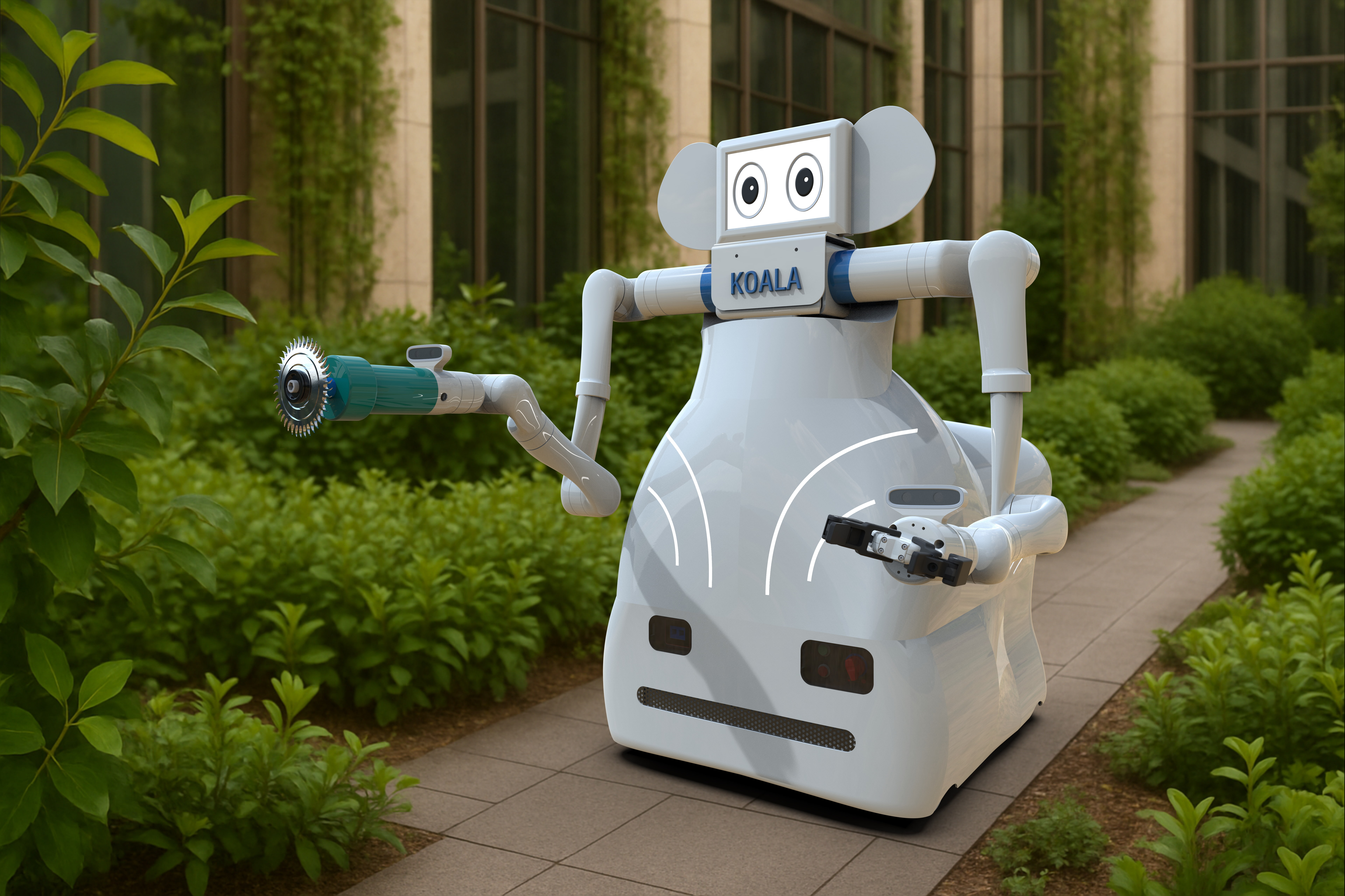
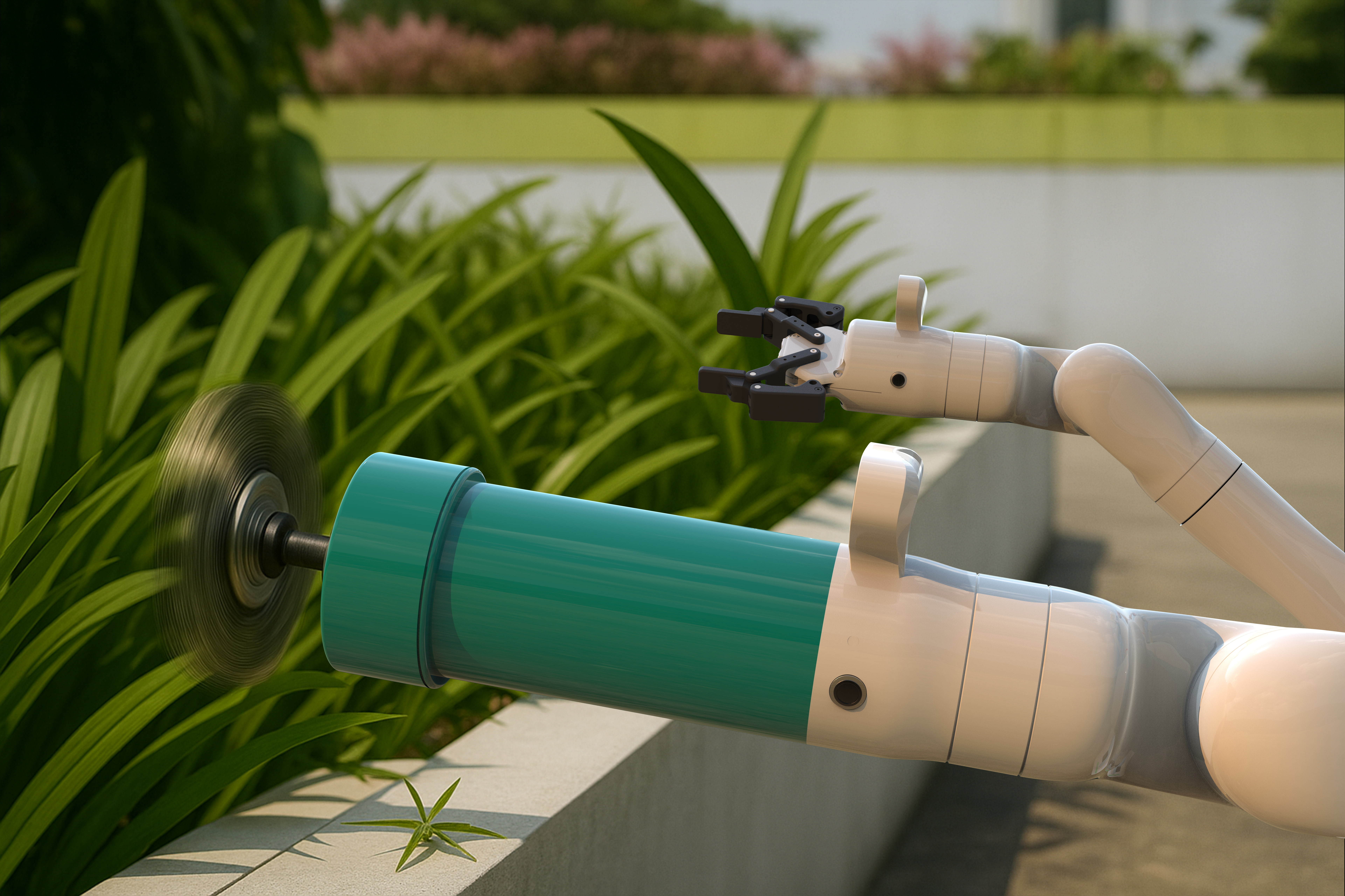
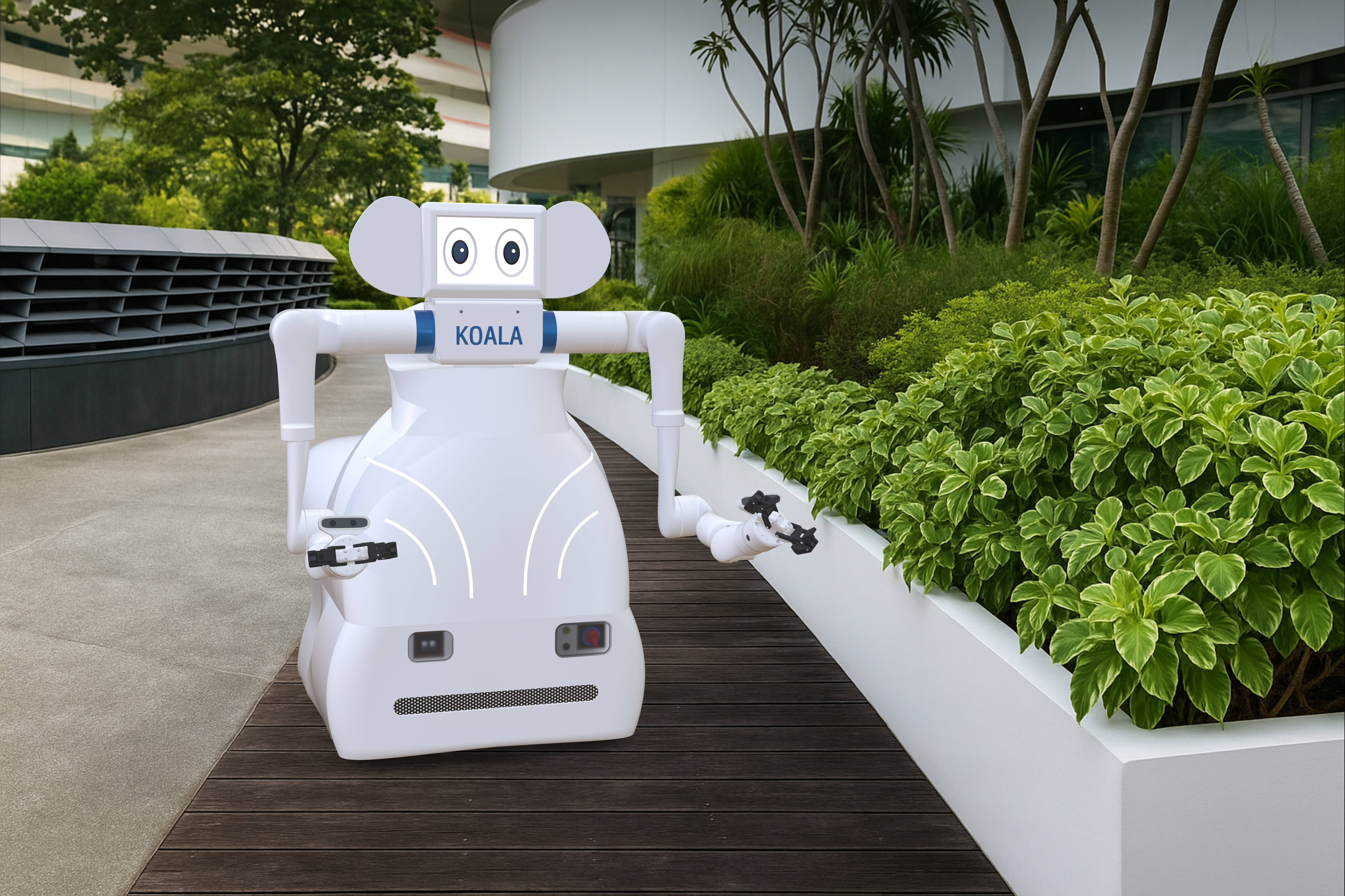


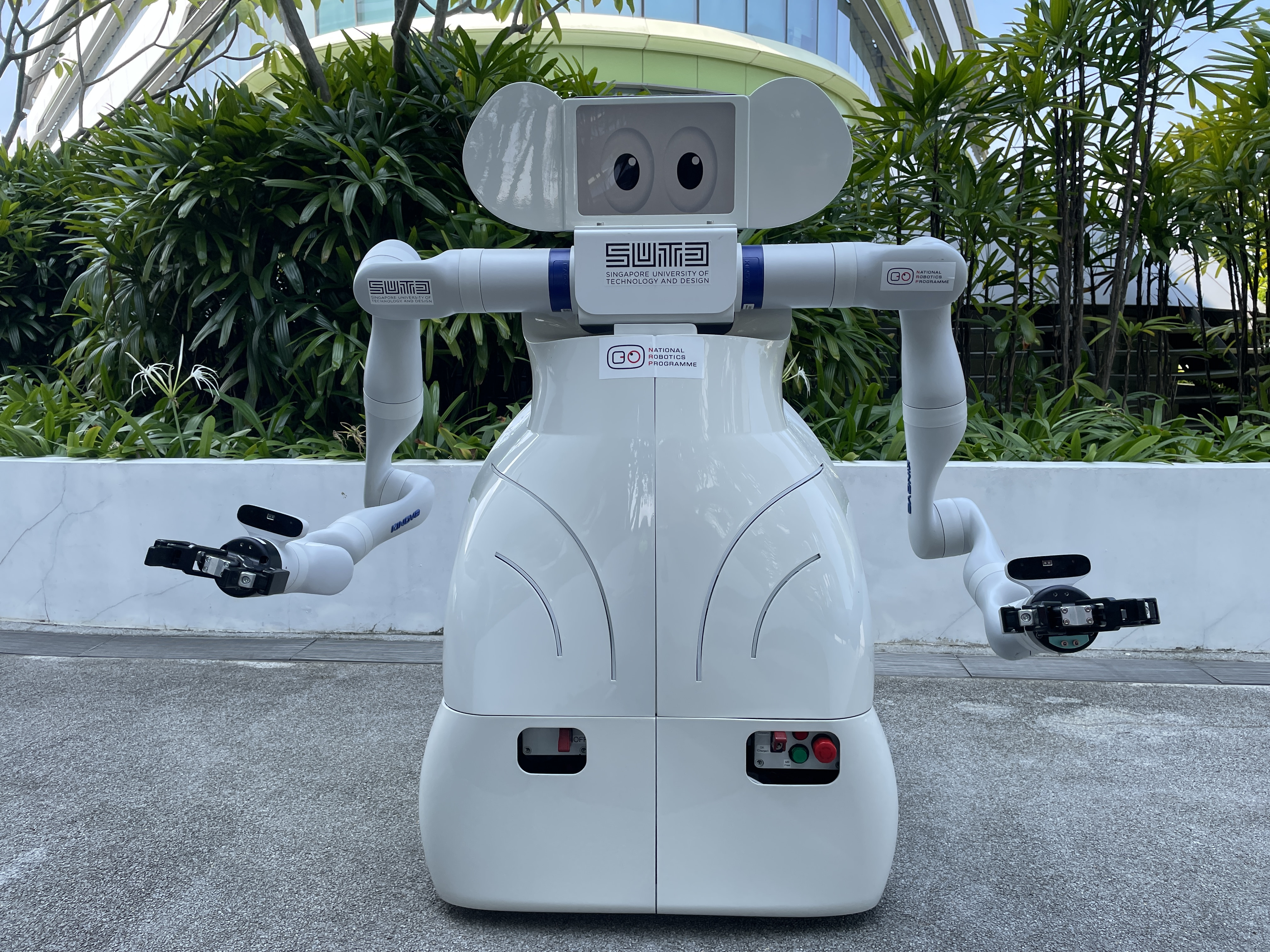
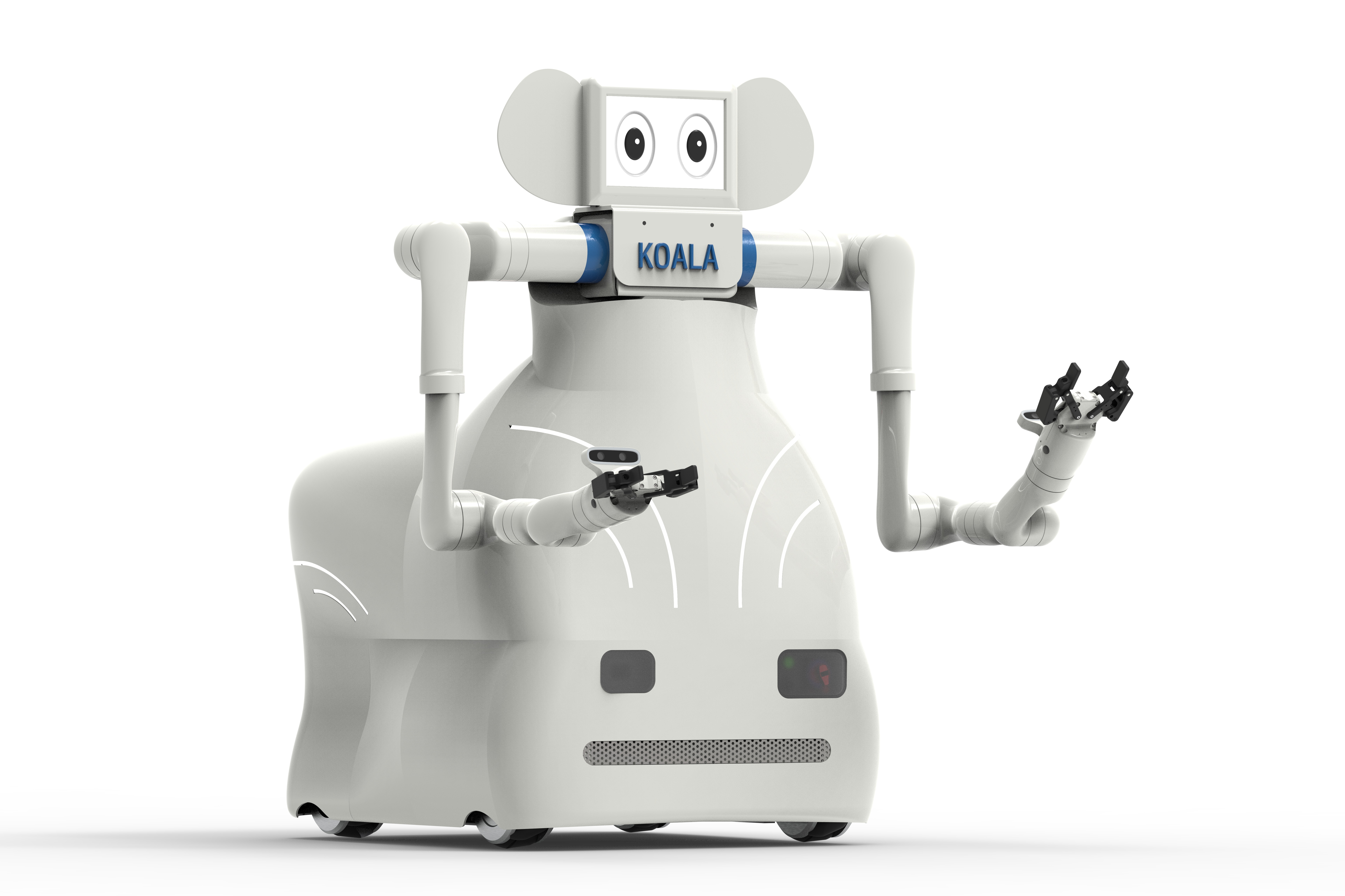
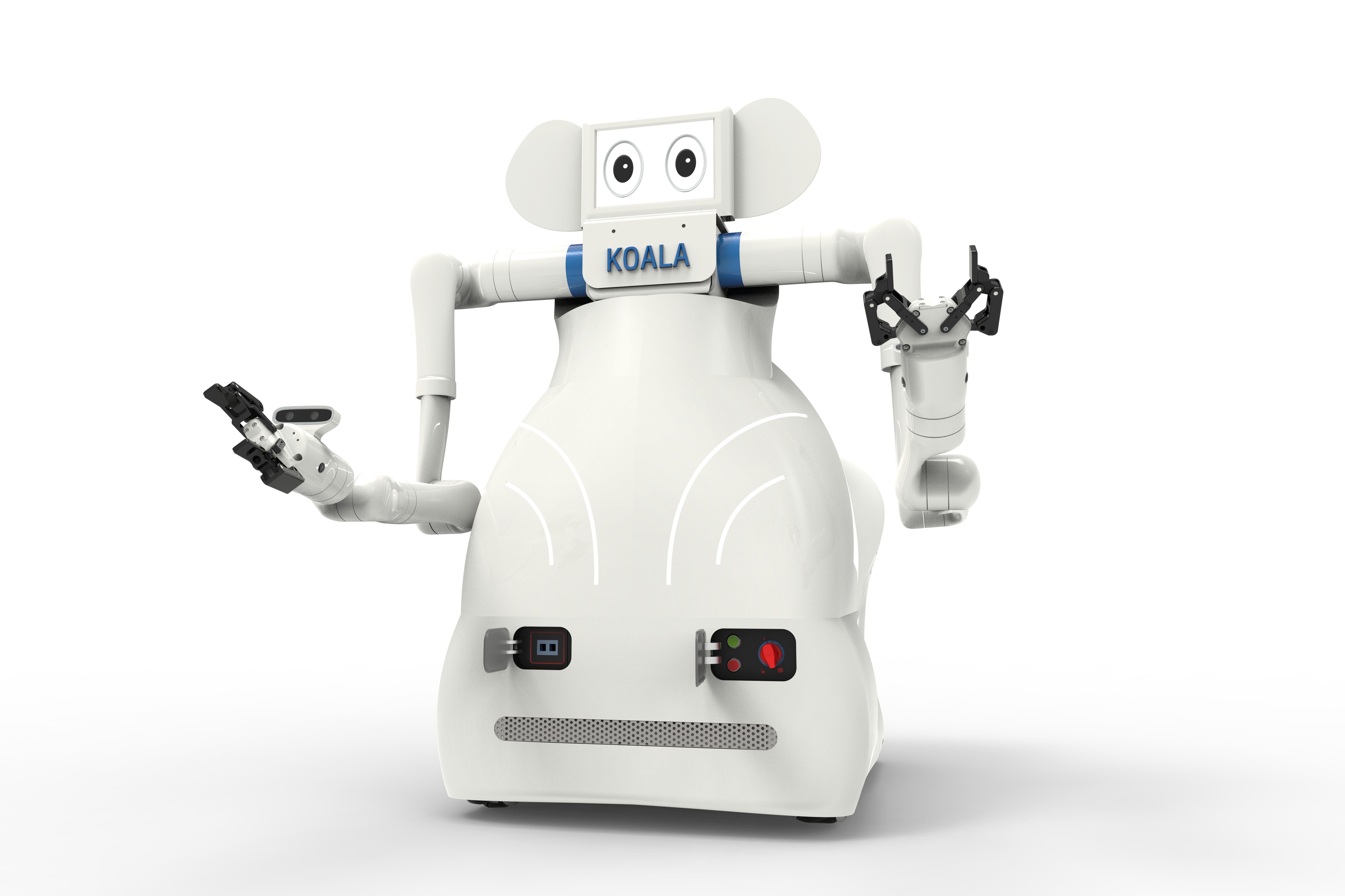

Image Credit : Devarassu Manojkumar, Rishivarathan Ilangovan
Project Overview
The KOALA robot revolutionises urban landscaping automation, targeting the tedious task of shrub pruning. As cities expand and green spaces are crucial for sustainable living, maintaining these areas efficiently is essential. KOALA addresses this challenge by merging innovative robotics, smart perception, and adaptable handling into a unified autonomous system. It navigates urban environments with dual robotic arms and omnidirectional wheels while performing precise pruning tasks. Its design features advanced sensor fusion, using LiDARs and depth perception cameras to map surroundings in real-time and accurately locate overgrown plants. Beyond automation, KOALA incorporates intelligence into pruning, assessing plant density, distinguishing shrubbery from structures, and optimising paths with inverse kinematics and SLAM-based waypoint mapping. The system learns from each deployment, enhancing effectiveness over time. Designed for sustainability and scalability, KOALA runs for 4 hours on a single charge, significantly reducing manual labour and resource use. This innovative robot leads a new generation of urban service robots, combining precision, autonomy, and environmental stewardship, and establishing a benchmark for the future of smart city maintenance.
Organisation
SINGAPORE UNIVERSITY OF TECHNOLOGY AND DESIGN
Team
Mohan Rajesh Elara, Devarassu Manojkumar, Prithvi Krishna Chittoor, Borusu Charan Satya Chandra Sairam, Rishivarathan Ilangovan, Manivannan Kalimuthu, Eduardo Sanchez Cruz, Kotaprolu Sai Smaran, Viraj Muthugala, Bhagya Samarakoon.
Project Brief
The KOALA robot is a versatile modular robot with dual arms that can navigate any heading. It is designed specifically for precision pruning in urban landscapes. It addresses the increasing demand for sustainable and efficient landscaping solutions, particularly with the challenges of labour shortages and rising operational costs. This innovative robot automates repetitive pruning tasks. Each robotic arm can handle a payload of up to 4 kilograms, making it perfect for tackling overgrown plants. With a robust design, the robot can manage a total payload capacity of 400 kilograms and continuously operate efficiently for up to 4 hours. It also features advanced sensor fusion with 2D and 3D LiDARs, Intel RealSense depth cameras, and an inertial measurement unit to ensure precise mapping, localisation, and pruning point detection. Including the YOLOv8 object detection model ensures robust plant recognition, achieving over 98% detection accuracy. With two operational modes, mapping and autonomous pruning, it can recognise, segment, and trim targeted shrubs with minimal human input. Continuous waypoint navigation and effective pruning logic significantly reduce overgrown areas before moving on to the next section. The KOALA robot beautifully demonstrates how robotics can advance sustainable urban maintenance by automating traditionally labour-intensive tasks, optimising resource use, and enhancing the consistency of pruning quality. (Note: This Project was supported by * SUTD-ZJU Thematic Research Grant, Grant Award No. SUTD-ZJU(TR) 202205 * Ermine III: Deployable Reconfigurable Robots, Grant Award No. M22NBK0054)
Project Innovation/Need
Traditional urban landscaping practices, particularly pruning, are labour-intensive. KOALA addresses these challenges through its advanced smart sensor fusion algorithms, innovative dual-arm manipulation integration, and omnidirectional mobility. The innovation is evident in its cross-functional sensory system, which integrates 2D and 3d-Lidar, RGB cameras, depth sensors, and IMU data to accurately detect, localise, and navigate around target plants within dense and cluttered environments. While most existing robotic systems either necessitate teleoperation or are constrained by limitations in maneuverability and detection accuracy, KOALA successfully achieves autonomous pruning by deploying a trained YOLOv8 algorithm, capable of recognising overgrown boxwood plants with high precision. This capability is further enhanced by distortion-corrected visual processing and 3d camera projection, which effectively marks pruning points directly on the 2D occupancy grid maps. A significant innovation is KOALA’s cyclical operational ability, which involves mapping, pruning, and updating maps with reduced pruning points, thereby ensuring comprehensive coverage without redundant efforts. With a capacity for up to four hours of autonomous runtime and operational speeds ranging from 10 to 50 cm/s during the pruning process, KOALA demonstrates superior performance compared to manual operations in both time efficiency and consistency. This development introduces a scalable solution for municipal bodies and landscape contractors, enhancing urban aesthetic maintenance while minimising dependency on manual labour. The contributions of KOALA in sensor fusion, real-time SLAM, and high-degrees-of-freedom collaborative manipulation represent a significant advancement in urban robotic applications, with substantial potential for expansion into other urban maintenance tasks.
Design Challenge
Creating the KOALA robot was an exciting journey that brought us several fascinating design challenges to tackle, like mobility, payload, precision, and real-time perception in bustling urban environments. One of our key goals was to ensure superb maneuverability in tight spots, such as sidewalks and garden paths. We addressed this by using mecanum wheels, which allow for smooth omnidirectional movement and a zero-turning radius. Another important task was designing a chassis that could handle a hefty payload of up to 400 kg while remaining stable for precise pruning operations with fully extended dual robotic arms. Achieving precision localisation and mapping presented some technical challenges, leading us to combine various sensor devices. We integrated LiDARs for comprehensive 360° scanning of the environment, detailed depth data, and an IMU for stability in orientation. Making sense of this data in real time became possible through a dual-IPC system that balanced the processing demands of locomotion and manipulation subsystems. When it came to manipulation, our end-effector design had to be compact and energy-efficient without skimping on cutting strength. We achieved this with a sturdy 3d-printed housing and an onboard motorised blade system. Additionally, accurately selecting pruning points from noisy sensor data was another significant hurdle; we overcame this by preprocessing Lidar point clouds, using YOLOv8 segmentation masks, and transforming 2D points into 3d coordinates. Altogether, these design challenges united a diverse team of engineers specialising in mechanical design, embedded systems, machine vision, and SLAM localisation, culminating in an impressive, field-ready urban pruning robot.
Sustainability
The KOALA robot plays a vital role in enhancing urban sustainability by incorporating automation, improving energy efficiency, and reducing reliance on manual labour. By shifting from traditional pruning methods to this innovative autonomous solution, the robot protects human workers from harsh outdoor conditions and repetitive strain while prioritising their safety. It offers four hours of continuous use, lowering the frequency of recharging cycles and minimising its environmental impact. The robot's design features lightweight, 3d-printed materials for the end-effector and a modular structure that enhances resource efficiency and simplifies maintenance and component reuse. Sustainability remains a focus, as the precise pruning, powered by YOLOv8 for plant detection and incorporating Lidar/depth data fusion, ensures that only necessary vegetation is trimmed, keeping plant health and ecosystem balance intact. Moreover, KOALA’s automation refines landscape maintenance scheduling, helping to mitigate potential overgrowth hazards while avoiding excessive pruning. Its dual-phase mapping and pruning approach conserves energy and time by removing unnecessary repetitions. Additionally, KOALA’s scalable and adaptable architecture paves the way for future upgrades, such as solar charging, eco-friendly materials, or predictive maintenance algorithms that can further reduce downtime and extend the lifespan of its components.
Product Design - Technology
This award celebrates creative and innovative design for either a component or overall product. Consideration given to aspects that relate to human usage, aesthetics, selection of components and materials, and the resolution of assembly, manufacturing and the overall function.
More Details